The Importance of Curvature (a.k.a Hessian) in Numerical Optimization
01 Oct 2014 CommentsWhy Curvature Is Important
我们知道,gradient 表示函数值变化的快慢,对于函数 $f(\b{x}), \b{x} \in \mathbb{R}^n$
表示 gradient 的第 i 个分量,$\nabla_i f(\b{x})$ 越大,函数值相对于 $x_i$ 变化越快。当 $\varepsilon$ 足够小时,上面的公式可以直接近似为 (说白了,就是一阶 taylor series)
假设 $\varepsilon = 0.1$ 算足够小,如果 $\nabla_i f(\b{x}) = 10$,那沿着 $x_i$ 方向走 $0.1$,函数值就差不多是下降 $1$,这里的 $\varepsilon$ 就是我们通常所说的 step length
那怎样判断给定一个 $\varepsilon$ 算不算足够小呢?对于不同的点 $\b{x}$,这个 足够小 的标准通常是不同的,对于 non-convex function 尤其如此。而这也是 curvature 发挥作用的地方
Curvature 就是以我们常说的 Hessian matrix 表示,以 $H$ 表示 Hessian matrix,$H_{ij} = \frac{\partial f}{\partial x_i \partial x_j}$,即 $f$ 在 $x_i$ 维的 gradient 随着 $x_j$ 的变化率,$H_{ij}$ 越大,这个变化就越剧烈。考虑 $H_{ii}$,$H_{ii}$ 表示 $\nabla_i f(\b{x})$ 随 $x_i$ 的变化快慢
-
如果 $H_{ii}$ 很大,$x_i$ 稍微变化一点,$\nabla_i f(\b{x})$ 就会变化很大,这样的话,$\varepsilon$ 就必须很小,因为稍微走大一点点,在 $\b{x}$ 处计算的 gradient 方向马上就失效了,函数值是上升还是下降就不好说了,因此,如果 $H_{ii}$ 很大,沿着 $x_i$ 方向就必须走得很谨慎,否则会带来优化过程的震荡
$H_{ii}$ 很大在 function surface 上的表现就是沿 $x_i$ 方向有 valley,参考下面给出的 Rosenbrock Function
-
如果 $H_{ii}$ 很小,也就意味着 $\nabla_i f(\b{x})$ 对 $x_i$ 的变化不那么敏感,这样我就可以放心大胆得迈大步前进,不用担心 gradient 方向会很快失效,这样既加速了优化过程,又保证了函数值有足够的下降
$H_{ii}$ 很小在 function surface 上的表现就是沿着 $x_i$ 方向特别平,极端的例子,你可以考虑平面
这里以 $H_{ii}$ 为例讨论了 curvature 信息对于优化的重要性,它决定了每一步优化的 step length (并且是每一维度的 step length) 到底多大比较合适
下面我们通过几个具体的例子看看 curvature 信息对优化过程的影响
Example 1 (one dimensional function)
首先看两个简单的一维函数
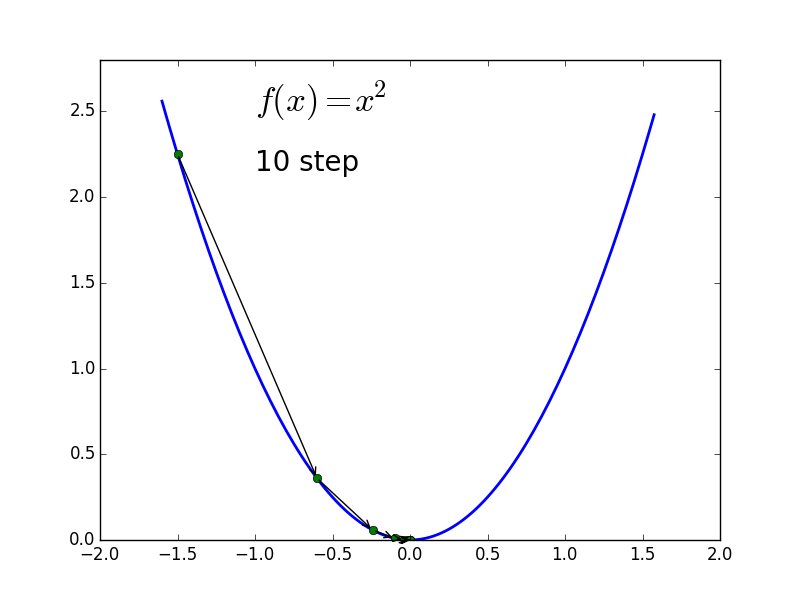
应用 Steepest Descent + Backtrack Line Search,优化过程可以用如下两个图表示
-
$f(x) = x^2$
-
$f(x) = 10 x^2$
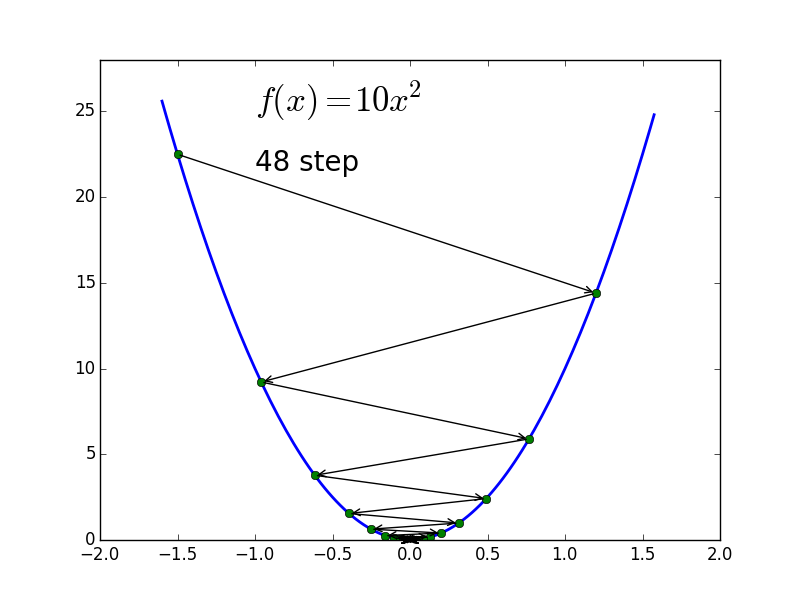
可以看到两个优化的过程都比较曲折,而其中 $f(x) = 10x^2$ 的优化过程更是左右振荡,而如果用 Newton Method 的话,根据其迭代公式
我们很容易发现,无论从哪里开始迭代我们都可以一步到达最优点
相比 Steepest Descent 的迭代步骤 (其中 $\alpha$ 表示 line search 得到的 step length)
Newton Method 实际上就是将 $\alpha$ 设置成了 $\frac{1}{f’‘(x^k)}$。另外,容易发现,当 $\alpha \gt \frac{2}{f’‘(x^k)}$ 时,迭代是发散的,$\alpha = \frac{2}{f’‘(x^k)}$ 时,迭代就一直左右震荡,所以,要想收敛,必须有 $\alpha \lt \frac{2}{f’‘(x^k)}$
Example 2 (Quadratic Programming)
假设要优化的函数为
这是个很简单的 quadratic function,其对应的 $H$ 为
从这个 Hessian matrix 我们可以知道
- 这个函数在所有点的 curvature 是 constant,其实对于所有的 quadratic function 这个结论都成立
- $H_{11} \neq H_{22}$,因此 $f$ 在 $x_1$ 和 $x_2$ 处 gradient 随自身的变化率是不相同的
- $H_{12} = H_{21} = 0$,因此 $x_1$ 的变化不会带来 $\frac{\partial f}{\partial x_2}$ 的变化,同样 $x_2$ 的变化也不会带来 $\frac{\partial f}{\partial x_1}$ 的变化
下面我们分别看看 Steepest Descent 和 Newton Method 应用于这个函数的结果
-
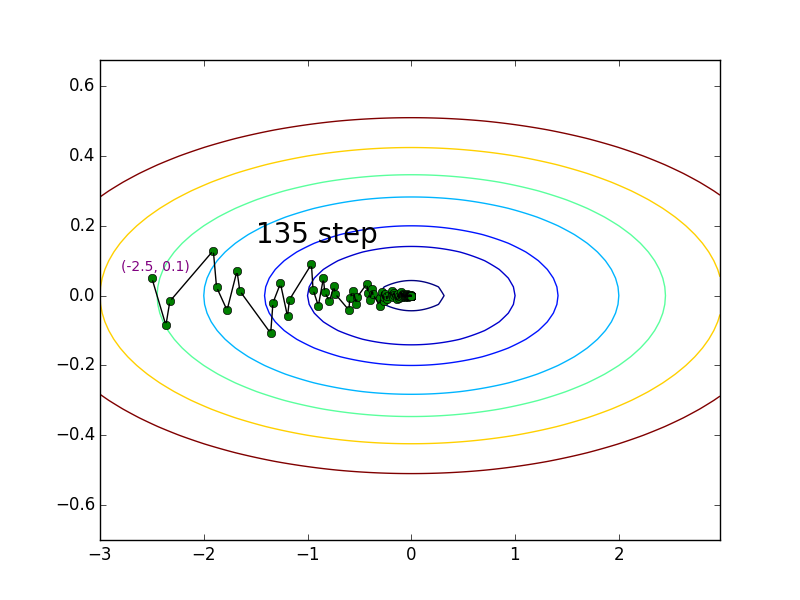
Steepest Descent
-
Newton Method
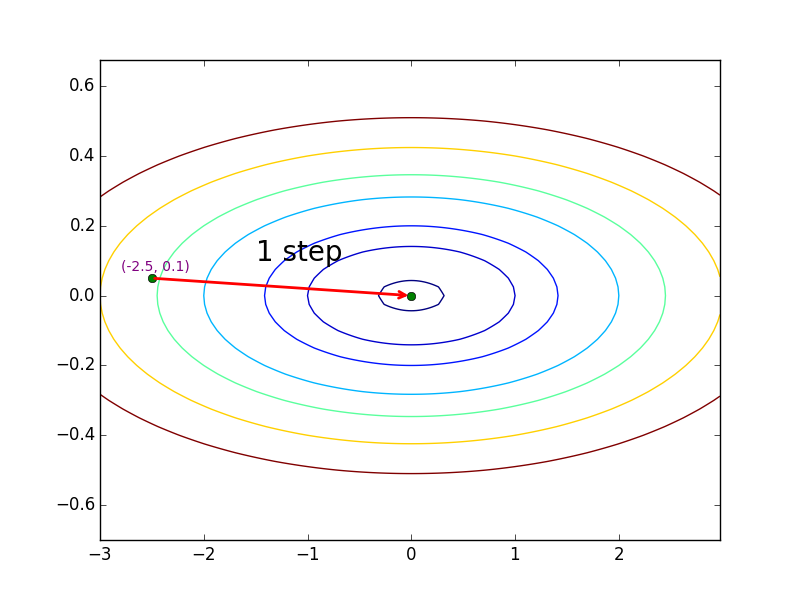
从上面的两个图可以看出,同样是从 $(-2.5, 0.1)$ 开始迭代,Steepest Descent 的迭代过程与 Classical Newton 相比要振荡得多,究其根源,就是由于 Steepest Descent 在每步选择下降方向时完全忽略 curvature 信息,而 Newton Method 则利用 curvature matrix 对下降方向进行修正。针对这个例子有
其中 $\b{g}^k$ 表示 $f$ 在 $\b{x}^k$ 处的 gradient。这么修正相当于根据 $f$ 相对于 $x_1, x_2$ 的不同的 curvature 给 $x_1, x_2$ 不同的 step length
Example 3 (Quadratic Programming)
上面的例子中,$x_1, x_2$ 的变化只影响 $f$ 相对于自身的 gradient,相互之间没有影响,下面我们看看更一般的例子,假设优化的函数为
其中 $A$ 为 positive definite matrix。易知这里 $A$ 就是 curvature matrix
Newton Method 的迭代步骤是这样
其中 $\b{g}^k = A \b{x}^k - \b{b}$。这里由于 $A$ 的 off-diagonal 项不都是为 0,所以 $A^{-1}$ 不是那么好直接理解
为了便于理解,我们对 $A$ 做 eigendecomposition
其中 $Q$ 的每一列表示 $A$ 的一个 eigenvector,由于 $A$ 是 curvature matrix,所以 $Q$ 的每一列又被称为 curvature axis,如下图所示,其中长的那个 axis 对应 eigenvalue 最大的 eigenvector,该 eigenvector 被称为 principal eigenvector,也是 curvature 最大的方向
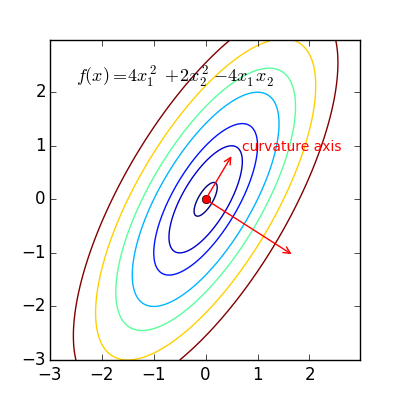
$\Lambda$ 是一个 diagonal matrix,对角线上每一项都表示 $A$ 的 eigenvalue,也就是 $f$ 沿 curvature axis 的 curvature。有了这个 decomposition 结果,我们可以对上述迭代做如下变换
$Q$ 的列向量构成 eigenspace,对于原空间中的任何一个变量 $\b{v}$,$Q^{-1}\b{v}$ 表示 $\b{v}$ 在 eigenspace 中的新坐标,因此如果把 Newton Method 的迭代映射到 eigenspace 中理解,它的效果就跟上个例子中的迭代一样,其实对于上一个例子,$Q = I$,eigenspace 和原空间是同一个空间
结合 Example 1 中对 1d function 的 step length 的讨论,我们也可以得出对于 quadratic programming step length 的限制
以 $\lambda_{max}$ 表示最大的 eigenvalue,则 step length 一定不能超过 $\frac{2}{\lambda_{max}}$,否则迭代在 principal eigenvector 方向是发散的,从而整个迭代就不能收敛。当 step length $= \frac{1}{\lambda_{max}}$ 时,迭代在 principal eigenvector 方向收敛是最快的,但可能造成其他方向上收敛较慢
Example 4 (Rosenbrock Function)
Rosenbrock function 在接近 local minimum 的地方有个很深的 valley,如下图所示 (image from here)
{kind=link}
函数的 surface 上的 valley 就是 curvature 比较大的地方。对比 steepest descent 和 classical newton 中关于 Rosenbrock 的例子,可以发现 steepest descent 在 valley 处花费了很大力气才最后走到 local minimum,而 Newton method 由于考虑了 curvature 信息要快非常多
Conclusion
综上所述,优化过程需要把 curvature 考虑进去才能有更好的收敛性能
现实中,通常由于计算资源的限制,我们不能使用完整的 curvature 信息。为此,优化专家们发明了各种各样的方法去做近似,比如
- BFGS (L-BFGS),一种十分常用的优化算法
- Gradient Descent 中用到的 momentum 也可以看作一种对 curvature 信息的简单近似,因为它将历史上 gradient 的变化考虑了进去
- Hessian-free for deep learning